Científicos de la Universidad de Harvard diseñan un robot blando, llamado Octobot, que se mueve sin cables ni estructuras rígidas.
La robótica cuenta con algunos de sus mejores aliados en la naturaleza. Gracias a la biomímesis, se han creado dispositivos inspirados en insectos, hormigas e incluso lagartos. El último avance en esta materia ha llegado de la mano de otra tecnología prometedora, la impresión 3D, que ha servido para crear un robot blando muy parecido a un pulpo.
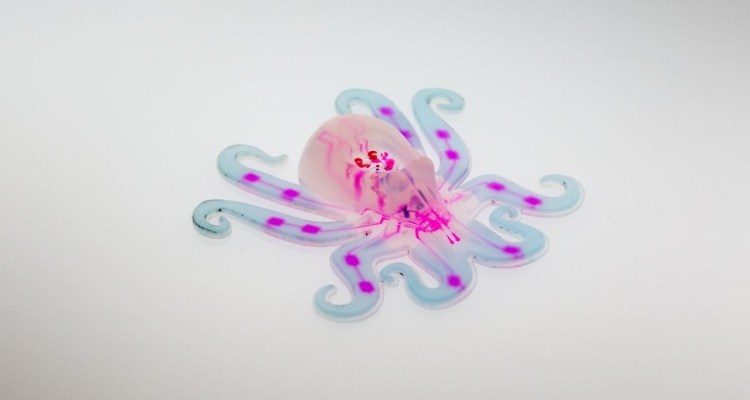
Científicos de la Universidad de Harvard han construido Octobot, un minúsculo pulpo de ocho brazos que presenta una autonomía inferior a diez minutos. Sus diseñadores sugieren que este es el primer robot blando, aunque en el pasado ya se vieron dispositivos muy interesantes relacionados con este campo de la robótica, conocido en inglés como soft robotics.


Un avance de la robótica blanda
Así, científicos de la Universidad de Cornell y Harvard presentaron hace unos años un robot blando que podía resistir condiciones climatológicas adversas y trabajar en situaciones peligrosas, en entornos con materiales corrosivos, luz ultravioleta u otros agentes potencialmente perjudiciales. Por tanto, hablando de manera estricta, Octobot no es el primer robot blando. Otras investigaciones también lograron músculos robóticos inspirados en la anatomía humana.
Pero, ¿qué hace a Octobot ser un robot tan especial? El primer reto afrontado en Harvard fue diseñar y fabricar las piezas del dispositivo por separado, gracias a la impresión 3D, y luego unirlas de manera conjunta. De este modo pudieron crear todos los elementos funcionales necesarios para el mantenimiento de este robot blando inspirado en un pulpo.
El trabajo, publicado en la revista Nature, muestra también un peculiar sistema para que el robot blando funcione, denominado por los investigadores como «neumático». Según explican en la web 3D Printing Industry, una reacción dentro del robot transforma el combustible líquido (peróxido de hidrógeno o agua oxigenada) en un gas, que fluye en el interior de los brazos robóticos. Así Octobot se hincha, de forma que consiguen sustituir las partes que convencionalmente son rígidas en estos robots.
[youtube]https://www.youtube.com/watch?v=1vkQ3SBwuU4[/youtube]
El avance tecnológico logrado por la Universidad de Harvard se apoya en otros sistemas de fabricación, además de la impresión 3D, como la litografía blanda y el modelado. A pesar de los buenos resultados, los científicos consideran que es importante mejorar la autonomía del robot blando, que dura sólo entre tres y ocho minutos.
Este tiempo es demasiado corto teniendo en cuenta la importancia de la robótica y las hipotéticas aplicaciones que podría tener Octobot, aunque de momento sea sólo una prueba de concepto. Y es que el gran objetivo, como señala El País, era demostrar que es posible fabricar un robot blando de este tipo. El artículo en Nature muestra el primer paso para cambiar la forma en la que las personas interactuamos con las máquinas. Y todo gracias a un curioso robot con forma de pulpo.
Imágenes | Universidad de Harvard






