Dave Akerman ha conseguido capturar imágenes de la Tierra de alta calidad a 38,9 km. con un globo sonda equipado con una Raspberry Pi y una cámara.
Hace algunas semanas dedicamos un artículo a la misión PhoneSat, un trío de smartphones apodados “Alexander”, “Graham” y “Bell” convertidos en los nuevos microsatélites de la NASA. El objetivo de esta misión era reconstruir imágenes de la Tierra en alta resolución a partir de lo captado por las cámaras de los smartphones y su posterior envío por señal de radiofrecuencia a varias estaciones de la Tierra, en donde cientos de radioaficionados ayudaron en la decodificación de los paquetes de datos de los satélites.
En esta ocasión no se trata de una misión de la NASA, sino de Dave Akerman y su intención de enviar al espacio una réplica en espuma del logo Raspberry Pi equipada con una cámara Pi para capturar imágenes de la Tierra. El objetivo marcado en esta peculiar hazaña era conseguir captar imágenes por encima de los 40 kilómetros de altitud. El lanzamiento estaba previsto para el pasado mes de abril mediante un globo sonda inflado con hidrógeno, pero las predicciones de viento no eran nada favorables para un vuelo de este tipo con aterrizaje en el mar. A pesar de ello, Akerman decidió seguir adelante aprovechando el tirón mediático del lanzamiento, junto a Eben y Liz, miembros de la fundación Raspberry Pi. Para ello, Dave fabricó un contenedor más adecuado para esta ocasión equipado con un flotador y así mantener el original para un lanzamiento posterior.


A pesar de que el vuelo fue bastante bueno y de que se trataba del primer experimento de este tipo realizado con la nueva cámara Raspberry Pi, en general la tasa de éxito de la misión no fue la esperada. La razón se debe a que la sólida cubierta de nubes que había en ese momento dificultaba la exposición para capturar imágenes con calidad y nitidez, además del error técnico de configuración de las opciones de captura para unas condiciones de iluminación que no se habían previsto en ese momento. Tal y como cuenta Akerman en su blog, al no poder teledirigir la cámara muchas de las imágenes aparecían desveladas por reflejos indirectos mientras apuntaban a la negrura del espacio. No obstante, se captaron imágenes en vivo únicas para este tipo de vuelo e incluso algunas de gran calidad.
Para el siguiente vuelo, se tomó nota de los errores cometidos en el lanzamiento anterior y se preparó todo el material, hasta que las predicciones de viento fueran las óptimas para el lanzamiento. Con el fin de evitar los problemas técnicos del anterior lanzamiento, se actualizó la última versión del software de la cámara Pi para su configuración en modo de medición matricial y se programó el software para capturar 3 tipos de imágenes por minuto: imágenes de pequeño tamaño para ser enviadas a un primer canal de radio, imágenes de tamaño medio para ser enviadas a un segundo canal de radio, e imágenes de alta calidad para que se almacenaran en la tarjeta SD de la cámara. De tal forma que, al igual que en la misión PhoneSat, las imágenes enviadas por la cámara Pi fueran registradas por señal de radiofrecuencia por un gran número de radioaficionados que colaboraron de forma desinteresada en la decodificación de las imágenes.
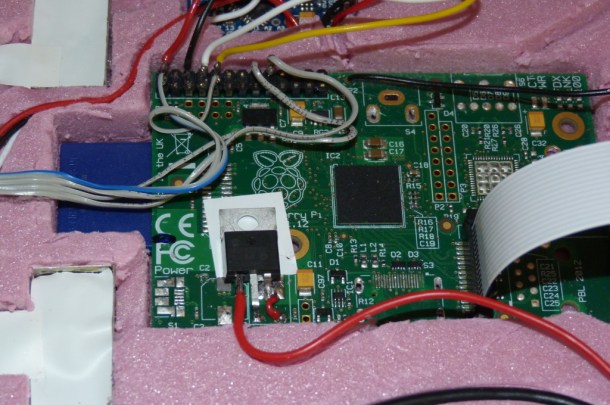
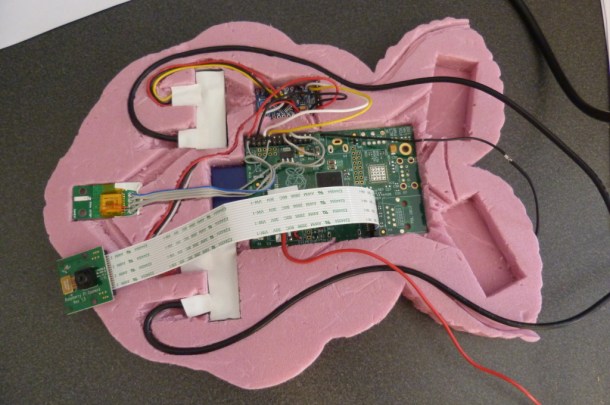
Los preparativos del globo sonda son bastante simples. Se cierra la carcasa de espuma en forma del logo de la fundación que alberga la Raspberry Pi, camara Pi y el rastreador por satélite, junto a la batería que alimenta el sistema. Se fija el globo al Raspberry Pi para el ascenso y el paracaídas para el descenso. En este caso y dada las ráfagas de viento, se tuvo que modificar el punto de lanzamiento para evitar un aterrizaje próximo a Bristol.
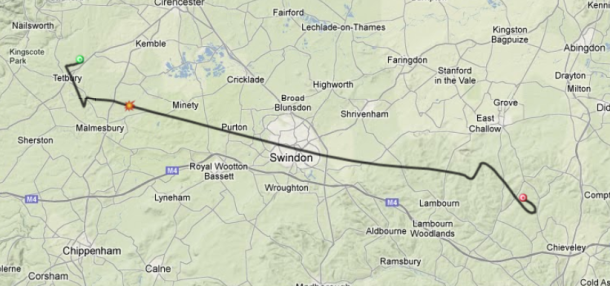
Tras el lanzamiento y con tiempo de vuelo previsto de 3 horas, la trayectoria de vuelo esperada mostró un itinerario previo al aterrizaje de al menos una hora en coche, en parte porque en el momento del lanzamiento el viento bajó su velocidad y aterrizó antes de lo previsto. Tras el registro de las imágenes recibidas, parece que esta vez la medición matricial de la cámara Pi y la buena climatología dio los resultados esperados, capturando imágenes de gran calidad e incluso en las imágenes de baja resolución registradas por el primer canal. Una de las imágenes almacenadas en la tarjeta fue tomada a una altitud aproximada de 38,9 kilómetros, más o menos en la misma posición donde se recuperó el artefacto.

En esta ocasión la participación desinteresada de los radioaficionados que registraron las imágenes enviadas fue excelente, a pesar de que Akerman utilizó un tasa de transmisión bastante alta que limita el rango de frecuencia. Las dos señales de radio habilitadas para registrar las imágenes fueron recibidas en Irlanda del Norte, Holanda e incluso en Francia.
La hazaña de Dave Akerman y su globo Raspberry Pi demuestran, con ciertas limitaciones tecnológicas, que con misiones low-cost como la del PhoneSat o la del globo con tecnología Raspberry Pi es posible llegar a límites impensables hace tan solo algunos años.
Imágenes | Dave Akerman