La nueva técnica permite generar mapas 3D en tiempo real con la ayuda de una cámara Kinect y un algoritmo de desarrollo propio.
Investigadores de informática en el MIT (Massachusetts Institute of Technology) y la Universidad Nacional de Irlanda (en la ciudad de Maynooth, cerca de Dublín) han desarrollado una técnica de mapeo capaz de generar planos detallados en tres dimensiones. El sistema utiliza una cámara Kinect dirigida por un algoritmo que permite armar la representación del entorno en tiempo real. Con el nuevo trabajo se ha resuelto un problema especialmente recurrente en robótica, que consiste en identificar el principio y el fin de un circuito como el mismo lugar.
El sistema se ha probado con éxito en las instalaciones del MIT, pero es válido tanto para interiores como para entornos exteriores. Funciona en dos fases. Primero la cámara Kinect graba vídeos sobre el objetivo que está previsto mapear. Gracias a la sensibilidad de este dispositivo se puede captar el relieve con precisión, que posteriormente será procesado como imágenes en tres dimensiones.


Después de la grabación, los investigadores aplican el algoritmo que han desarrollado el vídeo y así se da lugar a los mapas 3D. Un logro de este sistema es que las imágenes en movimiento no tienen que ser procesadas a posteriori, una vez que se ha terminado de grabar. A medida que la cámara capta el entorno, envía los datos a un ordenador, donde el software los procesa a la misma velocidad que los recibe, generando la estructura a tiempo real y transformándola cuando es necesario.
[youtube]http://www.youtube.com/watch?v=MNw-GeHHSuA[/youtube]
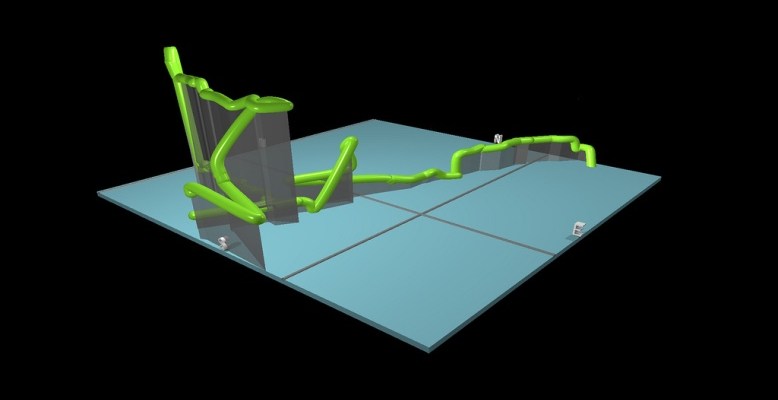
Puesto que el algoritmo trabaja a tiempo real con los datos que recibe, debe redefinir el mapa a medida que obtiene nueva información que arroja más luz sobre el entorno. El punto más complicado de este proceso es cuando la cámara llega al sitio donde comenzó a grabar. Aquí el software debe identificar este lugar como el principio del circuito y, por tanto, el final, con lo que la estructura quedaría cerrada. El sistema es capaz de transformar las imágenes de manera que encajen con las primeras informaciones y completar el mapa.
Cerrando la perfección del circuito
Esta compleja tarea venía siendo una de las cuestiones a resolver en el campo de la robótica, pues implica el reconocimiento de un entorno por el que ya se ha pasado y la capacidad de comprobar la coincidencia, encajando dos informaciones recibidas en distintos momentos. La técnica para crear mapas 3D en tiempo real, desarrollada por el MIT y la Universidad Nacional de Irlanda, es capaz de hacer esto, encajando todas las imágenes cuya orientación o emplazamiento puede haberse errado ligeramente respecto de la realidad.
A medida que el mapa se va generando, una escalera puede representarse un poco descentrada o una puerta algo desplazada. Este tipo de errores son los que limpia el nuevo algoritmo, que rastrea la posición exacta de la cámara durante su recorrido. Al regresar a un sitio por el que ha pasado antes, el software calcula qué elementos del mapa debe reajustar.
Imagen: !mz