Los robots blandos o soft robots son una nueva generación de máquinas robóticas que han sido diseñadas para realizar movimientos o tareas de una manera distinta a los planteamientos clásicos. Normalmente se basan en modelos biológicos como insectos u otros animales. Por ejemplo, los octópodos.
Hace años que la ciencia está descubriendo nuevas facetas de octópodos como los pulpos. Siempre nos han fascinado sus extrañas formas y sus sinuosos movimientos. Ahora, además, sabemos que son más inteligentes de lo que creíamos y que sus articulaciones les permiten realizar tareas complejas. Como agarrar cosas o asirse a cualquier superficie.


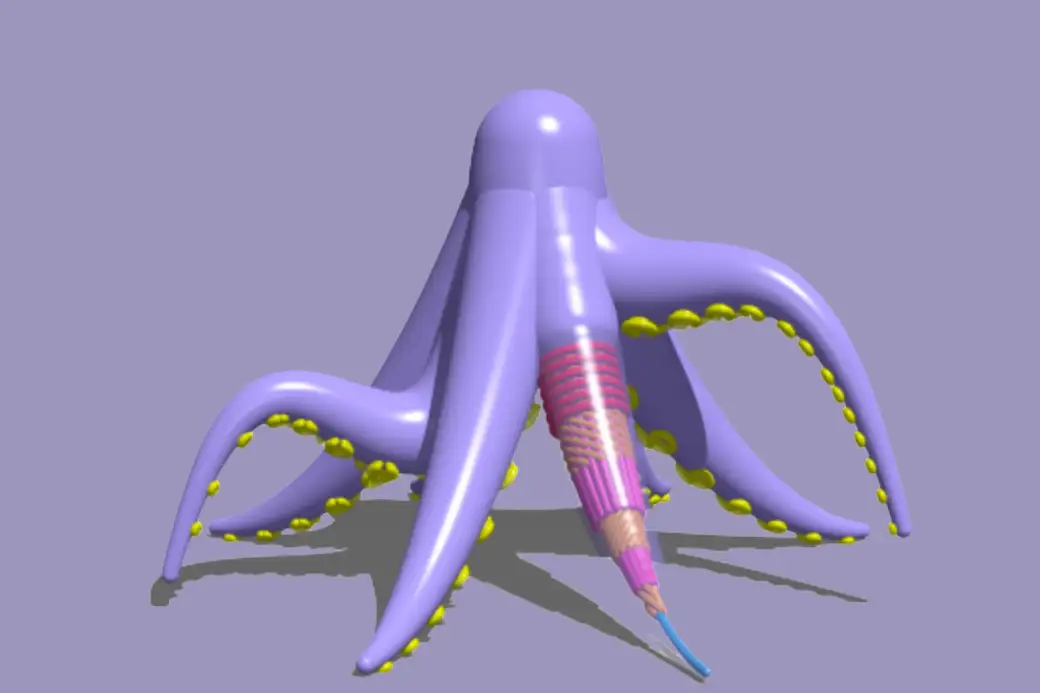
Precisamente, las extremidades de los pulpos pueden ayudar a diseñar robots blandos que sean capaces de manejar objetos con más soltura que empleando articulaciones mecánicas como las actuales. Gracias a la complejidad de los tentáculos, los pulpos logran nadar, gatear, arrastrarse, alcanzar y agarrar cualquier cosa que se les ponga por delante. ¿Y los robots del futuro puedan hacer lo mismo?
Robots blandos con tentáculos
En los últimos años, los investigadores han ampliado los conocimientos que tenemos sobre los octópodos. Estos conocimientos se han combinado con la robótica para dar pie a nuevas generaciones de robots blandos o soft robots con clara inspiración animal. La investigación, multidisciplinar, ha sido liderada por Prashant Mehta y Mattia Gazzola, profesores de ciencias mecánicas e ingeniería de la Universidad de Illinois Urbana-Champaign.
En concreto, estos dos investigadores, y sus dos grupos de trabajo, han desarrollado músculos de brazos basados en modelos fisiológicamente equivalentes a los tentáculos de los pulpos. El modelo resuelve problemas desde el punto de vista de la forma de la extremidad y de la manera de controlarla.
En palabras de Heng-Sheng Chang, estudiante y autor principal del estudio sobre robots blandos que imitan a los octópodos, los brazos de los pulpos “están accionados por tres grandes grupos musculares internos -longitudinal, transversal y oblicuo- que hacen que el brazo se deforme en varios modos: cortante, extensión, flexión y torsión», explica. «Esto dota a los brazos musculares blandos de una gran libertad, a diferencia de sus homólogos rígidos”.
Por otro lado, el control de estos músculos se realiza mediante una función de energía almacenada. Una solución tomada de la teoría de la mecánica de medios continuos. Interpretar los músculos mediante la energía almacenada simplifica drásticamente el diseño del control del brazo. En concreto, el estudio esboza una metodología de control de la energía almacenada para calcular las activaciones musculares necesarias para resolver tareas de manipulación como alcanzar y agarrar.
El proyecto CyberOctopus
La investigación sobre robots blandos mencionada en este artículo forma parte de un proyecto de mayor envergadura apodado CyberOctopus. En el proyecto, además de la propia Universidad de Illinois, participan la Universidad de Northwestern, la Universidad de Stanford y fondos económicos de la Oficina de Investigación Naval, una agencia que forma parte del gobierno de Estados Unidos a través de la Armada.
El objetivo de CyberOctopus es desarrollar un análogo computacional de los pulpos vivos (…) que se adapte, aprenda y evolucione a nuevas tareas, situaciones y entornos. (…) Impulsará la convergencia y la síntesis de nuevas teorías y algoritmos de control, la simulación de criaturas de cuerpo blando y nuevos conocimientos sobre la neurodinámica de los cefalópodos gracias a técnicas de detección in vivo sin precedentes.
Para ello, se han creado cuatro grupos distintos. Diseño de experimentos para dilucidar los mecanismos neurodinámicos de los pulpos. Desarrollo de sensores similares a los que incorporan a nivel biológico los octópodos. Control distribuido de un cuerpo distribuido. Y, finalmente, matemáticas del aprendizaje y del control distribuidos.
Biología y robótica unidas de la mano para imitar a los octópodos y crear así robots blandos más inteligentes, capaces de moverse en cualquier terreno y de sortear toda clase de obstáculos e inconvenientes. Una nueva generación de robots que podrán emplearse para cualquier tarea por complicada que parezca superando las capacidades de los modelos actuales.